Page 1 of 1
Best way to compare Photo Cloud with Laserscan Cloud
Posted: Thu May 10, 2012 11:34 am
by bruedencity
Hello,
I have a Laserscan Point Cloud of a side of a building and I want to compare it with a Photo Point Cloud I got out of 123D Catch. The Photo Point Cloud has the same scale than the Laser Point Cloud. But I don't have any meshes.
Now I want just to see how accurate is the Photo Point Cloud. In the Laser Point Cloud there are some holes and the Photo Point Cloud has a little bit higher number of points. The Laser Cloud should be the reference.
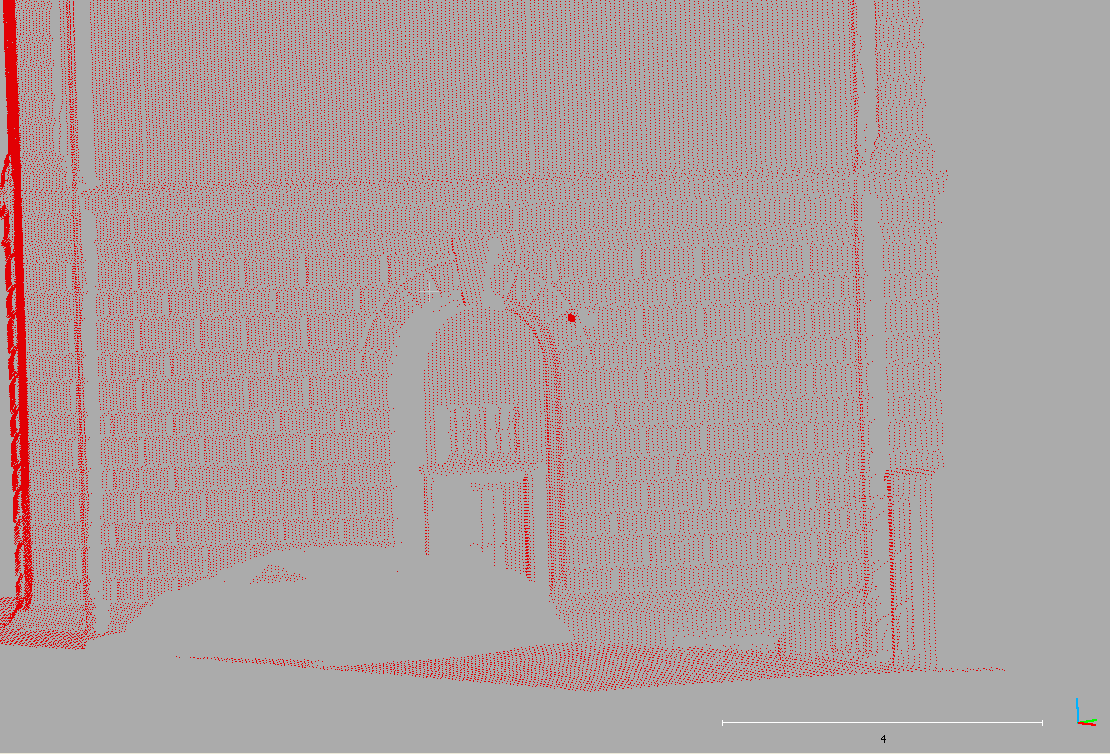
- Laser
- laser.PNG (94.62 KiB) Viewed 10672 times
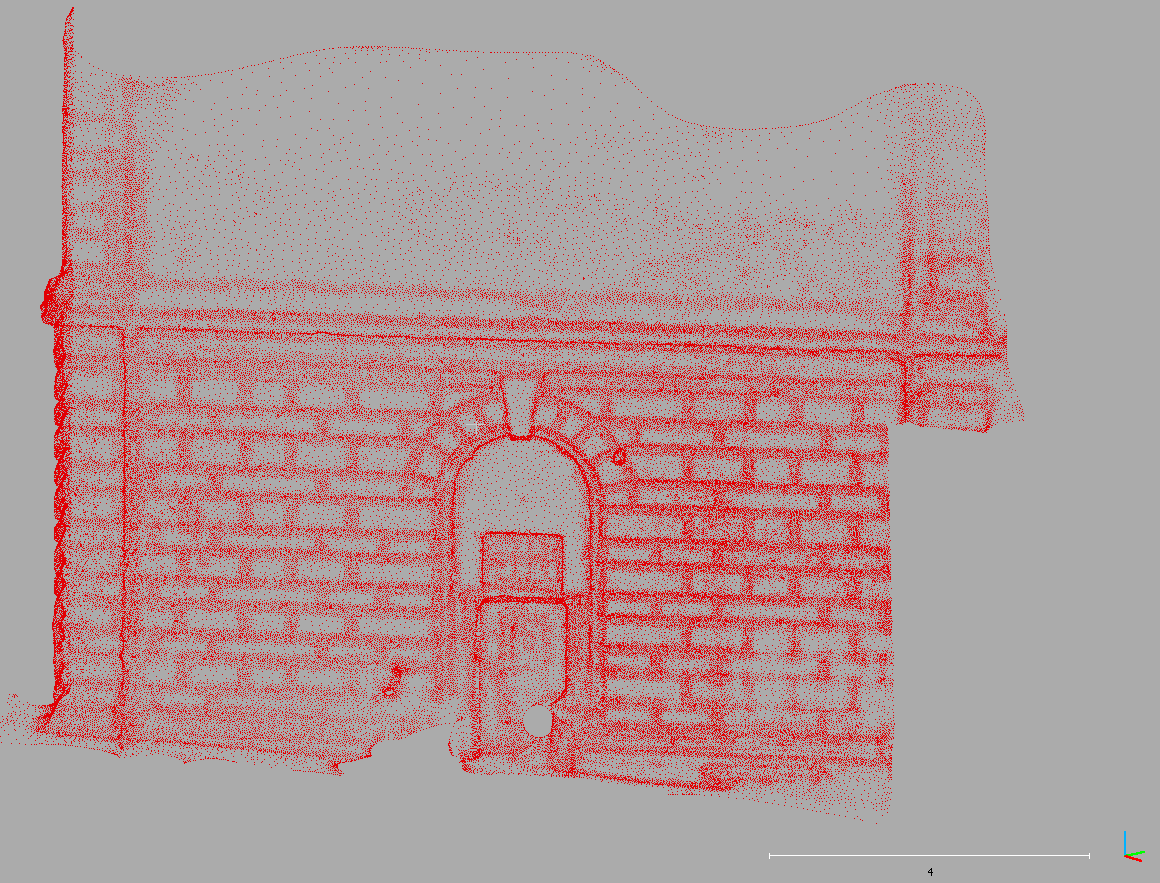
- Photo
- photo.PNG (135.47 KiB) Viewed 10672 times
Now I see, there is a Cloud/Cloud distance function. But I don't know which model to use.
At the end I want to get a histogram to visualize how many points of the Photo Cloud have a maximum distance of 3 cm to the Laser Cloud.
As you can see, the best results of the histogram I get with the LS-Plane and the Height-Function, but I don't know how they work.
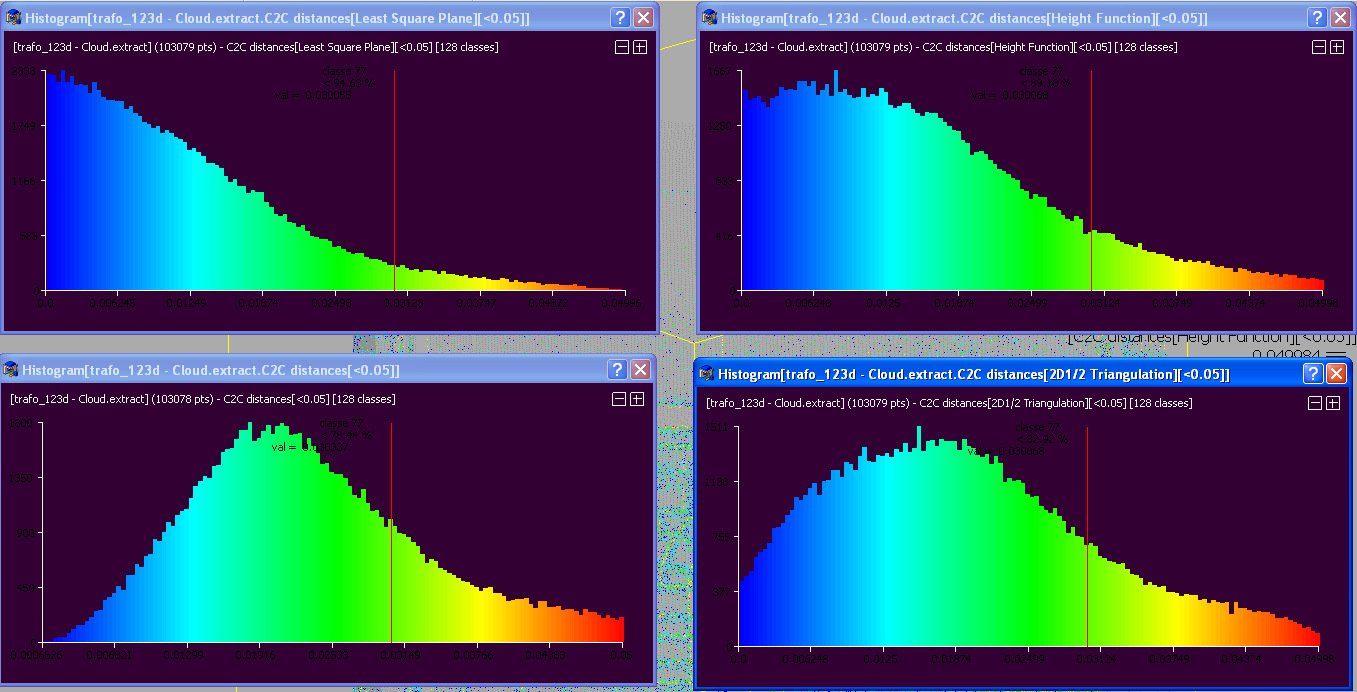
- Histogram
- histograms.PNG (85.82 KiB) Viewed 10672 times
I want to have a realistic result, so which model do you recommend for this kind of compare?
Thank you so much for your help,
Andi
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Thu May 10, 2012 3:57 pm
by daniel
Hi,
Thanks for submitting a very practical case like this.
I guess that the "NO MODEL" case corresponds to the bottom left histogram? We can observe a shift of the peak that is generally directly dependent on the reference cloud density (laser). Basically, the local models are only here to remove this shift as most as possible (in a global point of view - as this is a coarse approximation of the real underlying surface, it can sometimes locally produce worst estimations of the 'true' distance).
The most robust model is definitely the quadric (HF = height function) as it is computed with more points than the others and it can handle high local curvature (such as the one at the limit of the bricks for example). Its only drawback is when used with noisy clouds, but it's visibly not your case. The best model to deal with noise is the least square plane, but only if you have mostly planar surfaces. In your case I'm not sure it's a really good idea as most of your photo points seem to lie at the interface between the bricks (where the curvature must be high - but it's hard to tell).
The highest source of concern here is the presence of big holes in the laser cloud: have you removed the corresponding points in the photo cloud? During my PhD at EDF I had sometimes to 'sample' the clouds by manually segmenting good overlapping parts (not necessarily wide). This was necessary in order to cope with the holes in the clouds, but it was also a good way to outline local variations of the quality/accuracy in the different areas. There's also a way to take into account the actual visibility of the scanner during the acquisition of the reference cloud. However it's not very well documented and you need to give several parameters about the the scanner and its point of view (Edit > Sensors > Create).
How about the repartition of the distance values in 3D? Is there a global tendency? Or does most of the highest values lie in the brick ridges for instance?
And have you tried to create a mesh (Delaunay 2D1/2 should be more than enough with such a cloud - especially if you remove the left corner). With a mesh you can have signed distance (and you don't rely on local models of course).
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 7:31 am
by bruedencity
The highest distance values are in the brick ridges, because the Laser Data seems to have some gaps at this points.
The following pictures shows the Height Function.
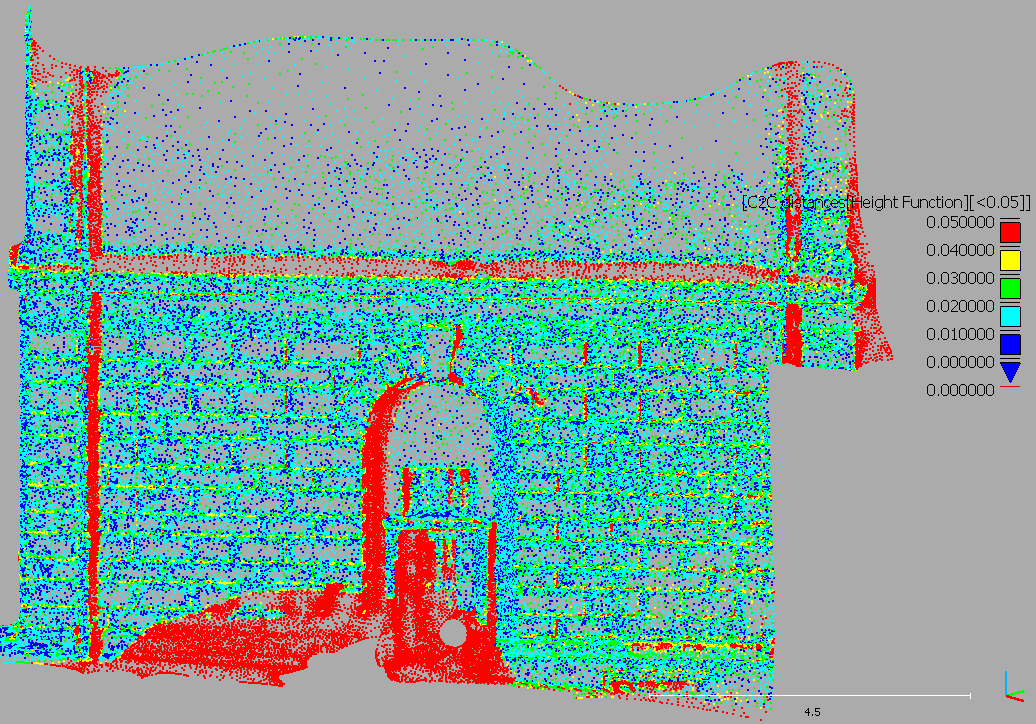
- HF.PNG (188.25 KiB) Viewed 10668 times
To handle the holes in the Laser Data we cutted out the distances > 5 cm with the Filter by scalar value
- HF_Filter.PNG (172.13 KiB) Viewed 10668 times
This is only a test to get to know to the software. The final object won't have that large holes in the Laser Data.
We just tried out creating a Mesh out of the Laser Data.
- Normals (Height Function)
- Poisson Reconstruction
- Cloud/Mesh distance
Is this the right way?
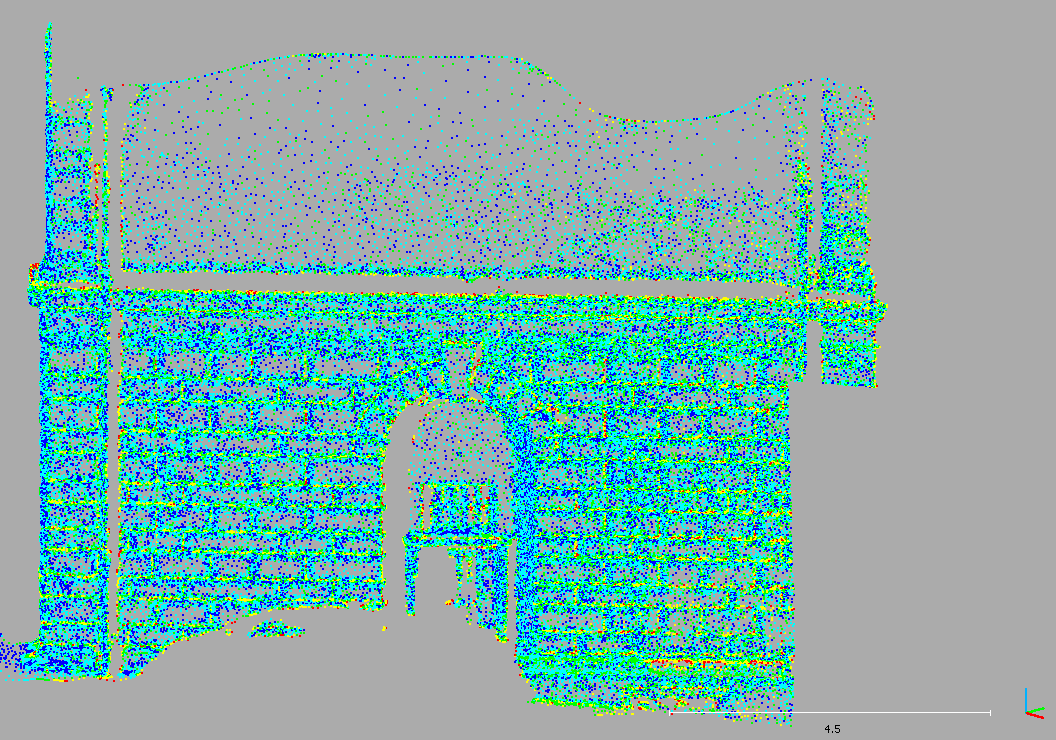
We tried to set the parameters of the scanner and compared the Mesh of the Laser Data with the Laser Data itself.
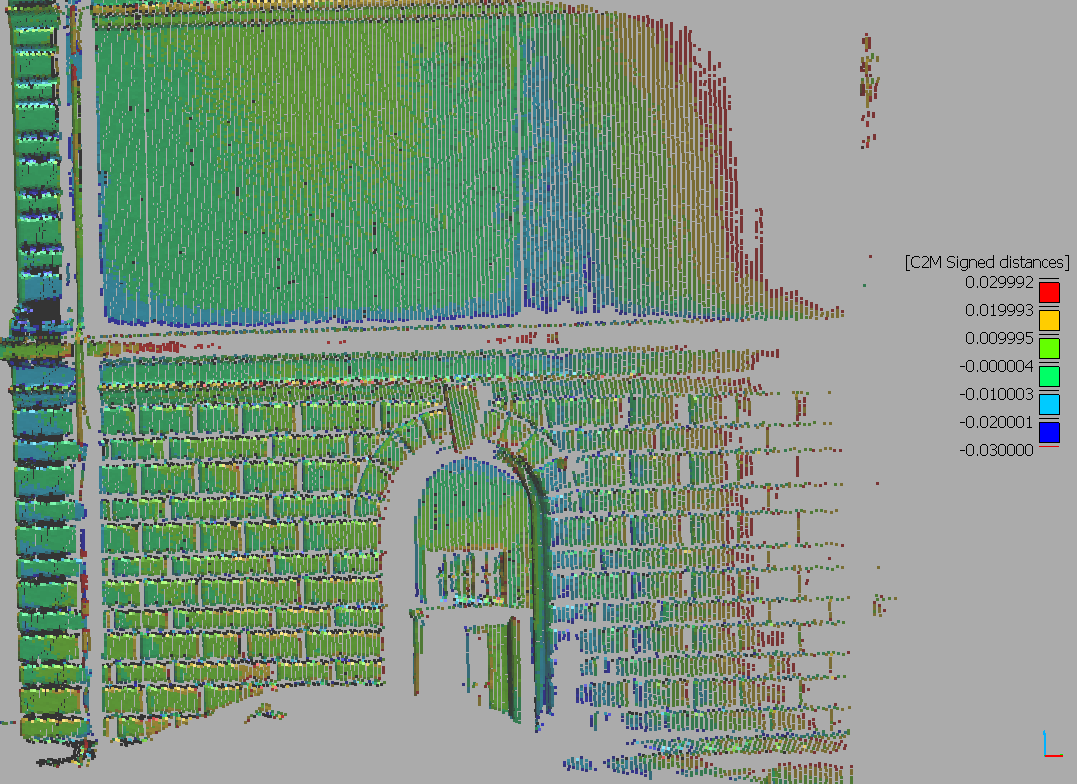
- Mesh.PNG (201.78 KiB) Viewed 10667 times
We wondered about the different distances. The Mesh is created out of the Laser Point Cloud and there are sometimes differences to it about 3 cm and more. Especially on the right side there must be more distance to the Laser Data than 3 cm. Do you have an idea what happened?
So you recommend the Mesh/Cloud distance at first?
And with Cloud/Cloud distance the Height Function model because of the curvature?
Thank you, you helped us very much
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 8:42 am
by daniel
Yes, to handle big holes or low density reference clouds it's always better to try to get a (global) mesh prior to comparison.
And in your case:
- don't use Poisson, it's meant to be used with closed objects. And you must also already have - good - normals associated to the points (the "Normals > Compute" tool is too lame). A Delaunay 2D1/2 mesh computed on the best LS plane should be fine. You can also smooth it a little bit (with Mesh > Laplacian smooth).
- and if the mesh is too dirty and/or if you get a reference mesh with less holes, indeed the 'Height Function' local modeling scheme should work fine.
P.S. : looking at your previous screenshots I've just upgraded the histogram dialog (one can now set the font size and the labels precision). I'll try to release a new version soon.
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 9:33 am
by daniel
About your cloud/mesh distance screenshot above, have you done it with a mesh computed with Poisson or Delaunay?
If Poisson, then it's normal as Poisson uses an octree (with a maximum level of subdivision) and thus it 'smoothes' the data. Moreover, as the object is not closed, you should have strange shapes on the edges.
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 10:04 am
by bruedencity
Thank you so much!
That was our fault... The 2 1/2D Triangulation works perfectly... Now we have a great result.
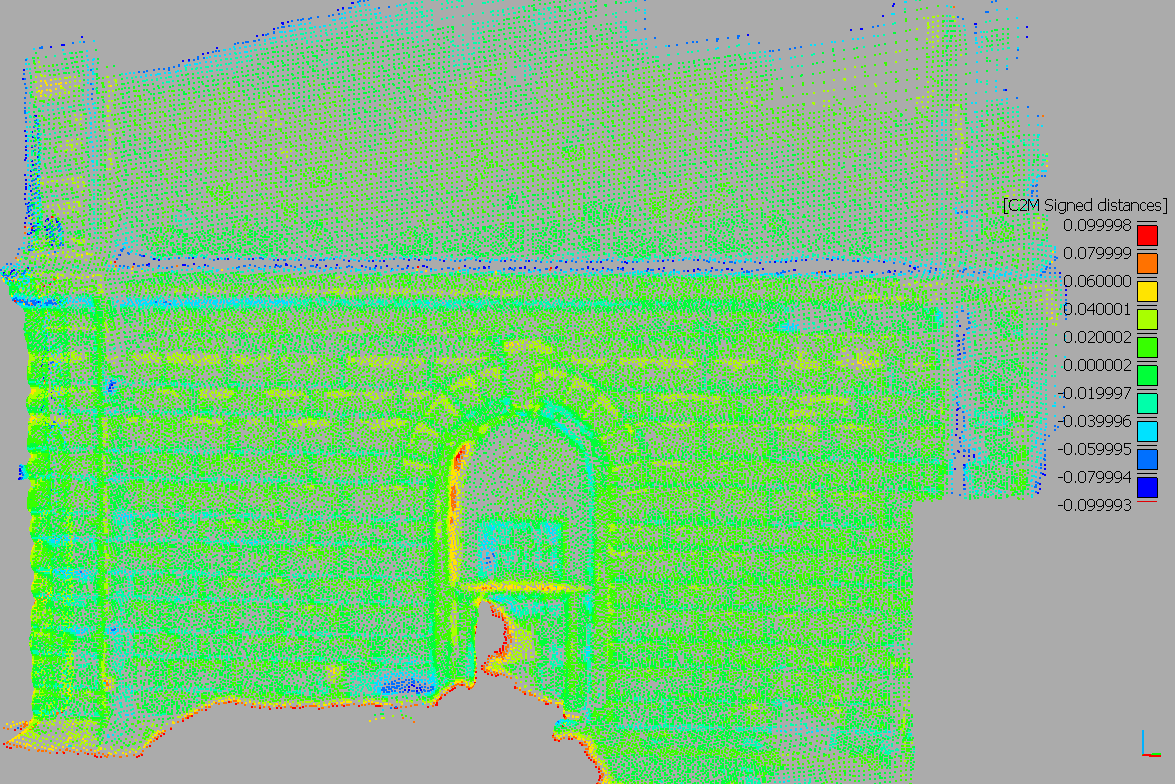
- delauny.PNG (201.82 KiB) Viewed 10663 times
Thank you for this great software :)
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 10:37 am
by Dimitri
Very interesting. So on the building front, laser and SFM are within 2 cm ? Which TLS did you use ?
Re: Best way to compare Photo Cloud with Laserscan Cloud
Posted: Fri May 11, 2012 1:15 pm
by bruedencity
Leica ScanStation 2